Autonomous RC Car
CompletedSelf-Driving | Collision Detection | Arduino C++
Role: Software Developer · Schematics & Wiring · Project Manager
Gallery
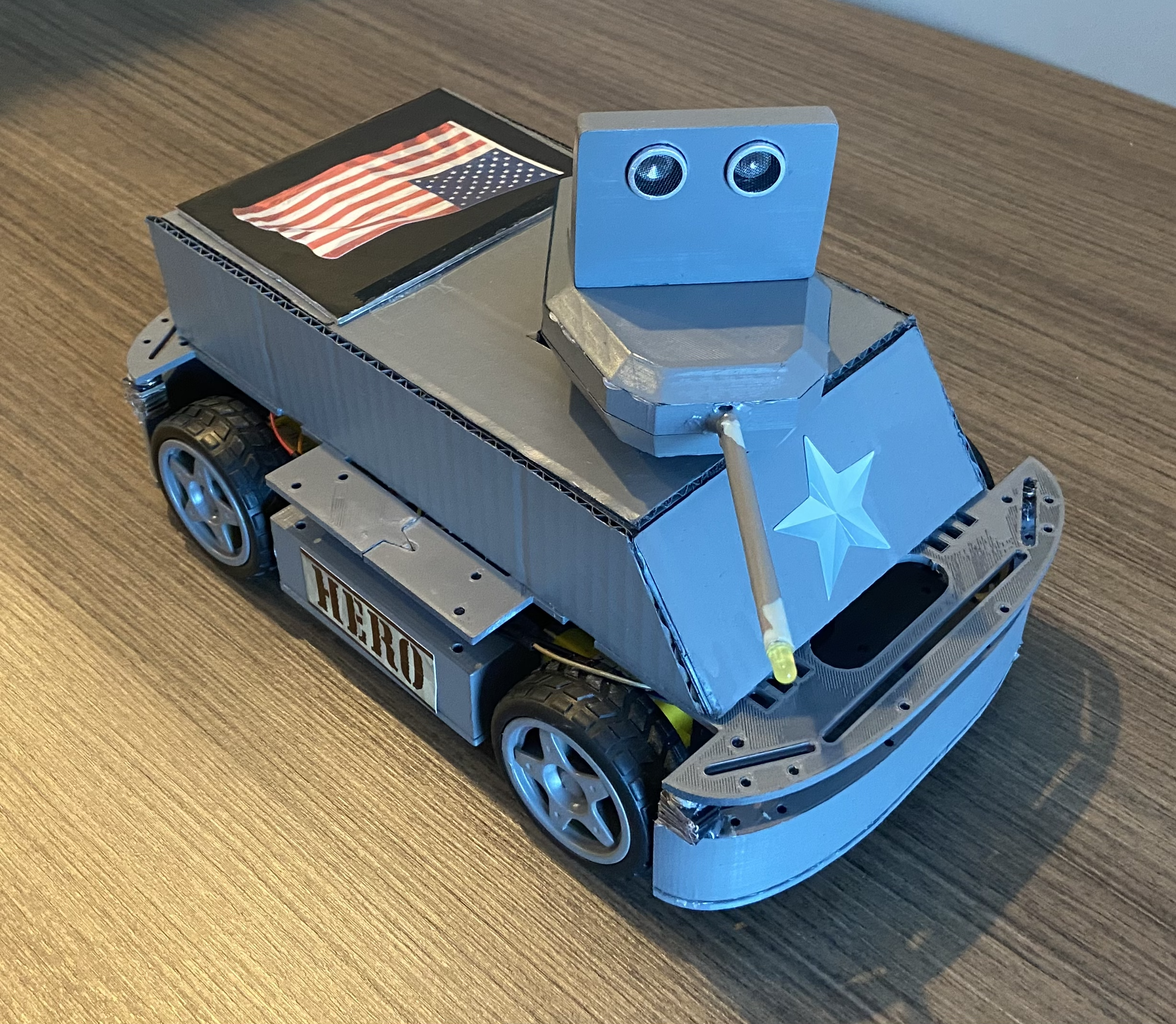
Tank Bot Overview
This project is a fully autonomous RC car powered by Arduino (C++) with real-time collision detection. It integrates a sound module, LED lighting, and recoil simulation for immersive robotics interaction.
Quick Specs
- Consistent speed: 1 m/s
- Straight-line drive (DC motors)
- 90° right turn capability
- Turret swivel via servo motor
- Reverse functionality
- Ultrasonic sensor for obstacle detection
- Recoil logic in C++
- LED light effects
- Shooting sound module
- Tank hatch with modular components
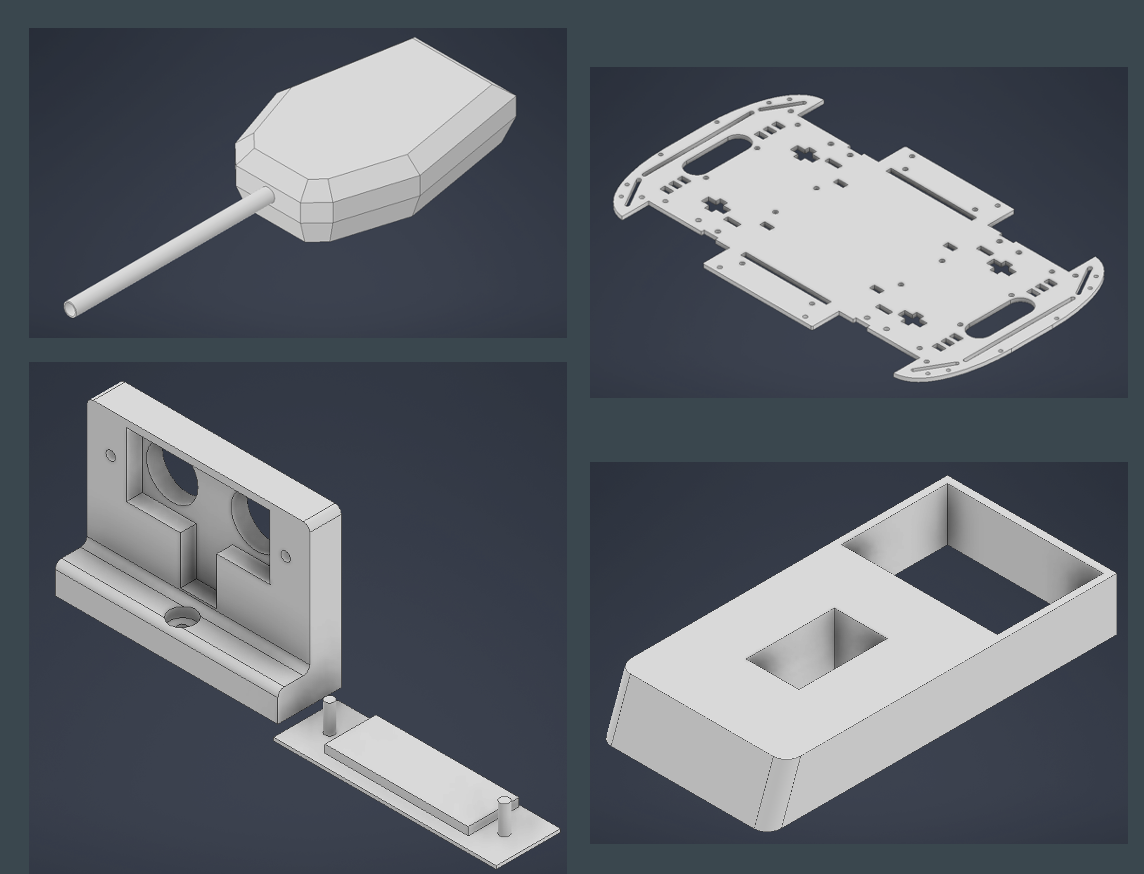
- 3D printed chassis (Bambu)
- Board: Arduino Uno REV3 [A000066]
- CAD design in InventorCAD
- View on GitHub
Tech Stack
Programming & Embedded Systems
- C++ – Core logic, control structures, hardware interaction, and performance optimization.
- Arduino IDE – Microcontroller programming, hardware interfacing, and real-time debugging.
- Arduino Libraries – Ultrasonic sensor control, servo motor management, LED and sound module integration.
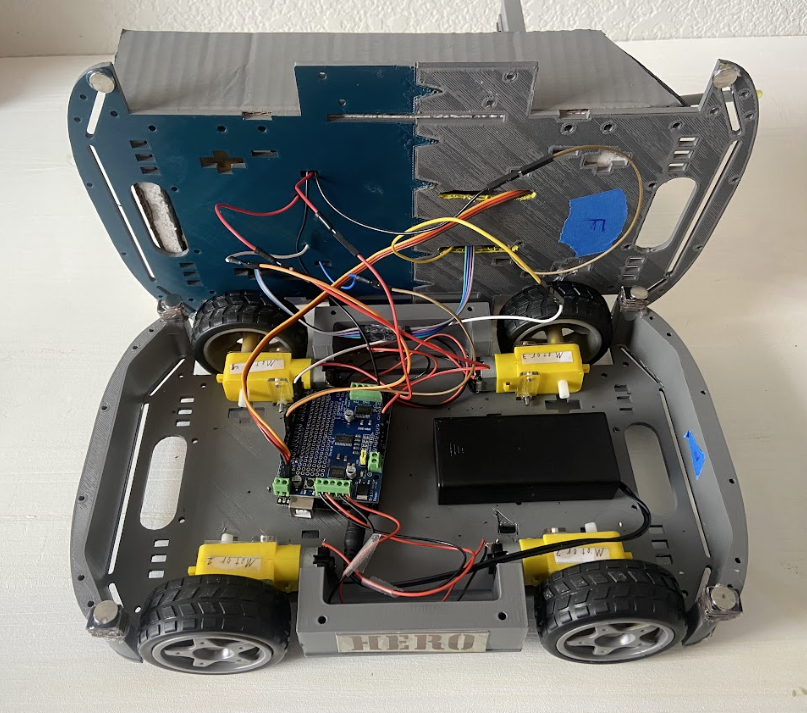
Hardware & Electronics
- Arduino Uno REV3 – Primary microcontroller board for system control.
- DC Motors / Servo Motors – Motion control and turret rotation.
- Ultrasonic Sensors – Obstacle detection and distance measurement.
- LED Lighting & Sound Modules – Visual and audio feedback systems.
- Breadboard & Wiring Harness – Prototyping and circuit connections.
CAD & Mechanical Design
- Autodesk Inventor / AutoCAD – 3D modeling and mechanical part design.
- 3D Printing (Bambu Lab) – Custom chassis and component fabrication.
- Mechanical Assembly – Integration of chassis, motors, sensors, and housing.
Project Management & Documentation
- GitHub – Version control and collaboration.
- Markdown / PDF Documentation – Spec sheets, schematics, and build guides.
- Agile Practices – Iterative prototyping and testing cycles.
Full Spec Sheet
*Names and contact information removed for privacy*